MoveIt2を使う¶
Pinocchioのインストール¶
https://stack-of-tasks.github.io/pinocchio/download.html を参考に、robotpkg-pinocchio をインストールしてください。
また、以下の記載を ~/.bashrc に追記してください。
export CMAKE_PREFIX_PATH=/opt/openrobots:$CMAKE_PREFIX_PATH
環境準備¶
Bitbucketから以下のリポジトリを取得します。
$ cd ~/repositories
$ git clone -b foxy https://bitbucket.org/tmc-dev-xr/hsrb_manipulation.git
$ git clone -b foxy https://bitbucket.org/tmc-dev-xr/hsrb_moveit.git
$ git clone -b foxy https://bitbucket.org/tmc-dev-xr/tmc_manipulation_base.git
ワークスペースを作成し、対象となるパッケージのシンボリックリンクを作成します。
$ mkdir ~/moveit_ws
$ cd ~/moveit_ws
$ ln -s ~/repositories/hsrb_manipulation/hsrb_analytic_ik
$ ln -s ~/repositories/hsrb_common/hsrb_description
$ ln -s ~/repositories/hsrb_common/hsrb_parts_description
$ ln -s ~/repositories/hsrb_common/hsrc_description
$ ln -s ~/repositories/hsrb_moveit/hsrb_moveit_config
$ ln -s ~/repositories/hsrb_moveit/hsrb_moveit_plugins
$ ln -s ~/repositories/tmc_manipulation_base/tmc_manipulation_types
$ ln -s ~/repositories/tmc_manipulation_base/tmc_robot_kinematics_model
ワークスペースをビルドし、setup.bashを読み込みます。
$ cd ~/moveit_ws
$ source /opt/ros/foxy/setup.bash
$ rosdep install --from-paths . -y --ignore-src
$ colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
$ source install/setup.bash
使用方法¶
MoveIt2を起動する¶
実機またはシミュレータを起動した状態で、以下のコマンドを入力してください。
$ cd ~/moveit_ws
$ source install/setup.bash
$ ros2 launch hsrb_moveit_config hsrb_demo.launch.py
注釈
HSRC の場合は hsrb_demo.launch.py の代わりに hsrc_demo.launch.py を利用してください。
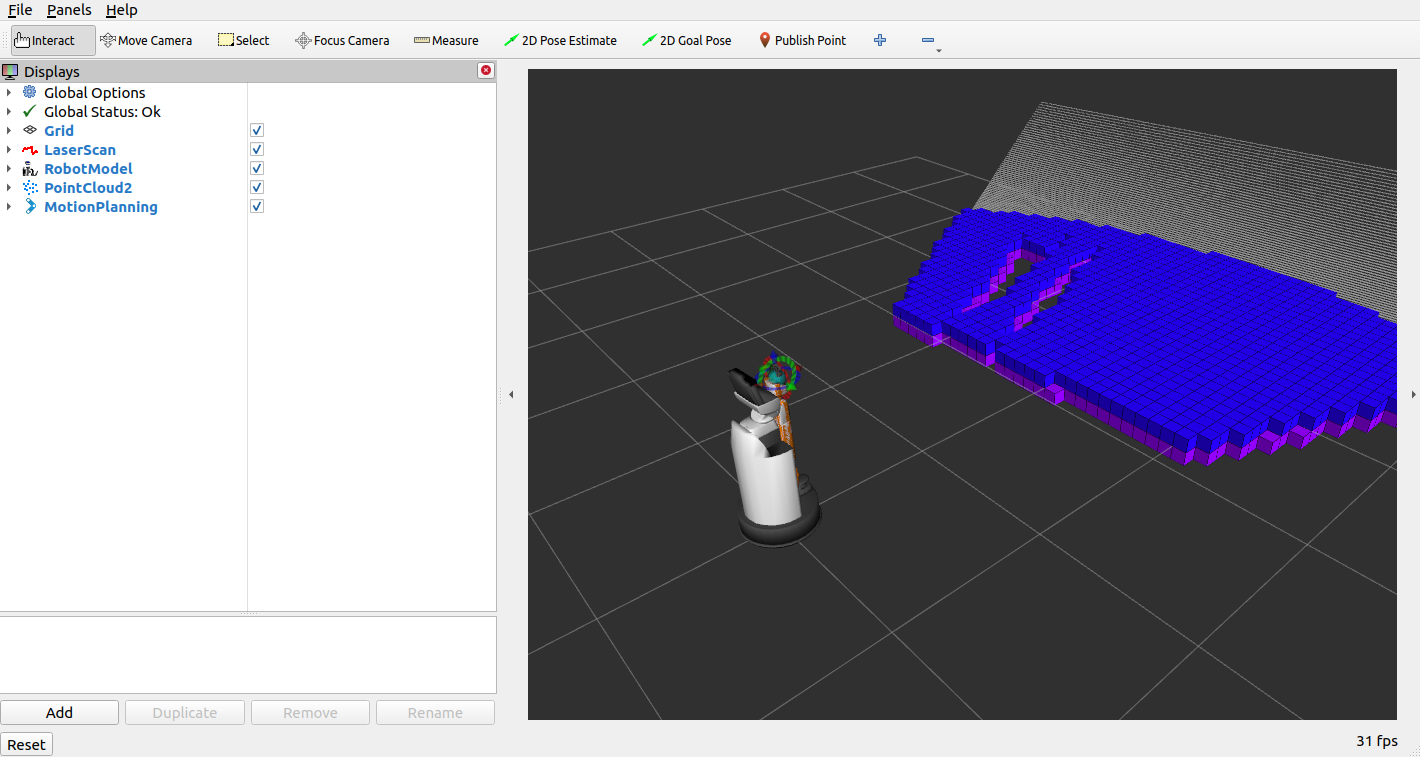
以下の様にrvizが立ち上がり、ロボットモデル、インタラクティブマーカーが表示されたら成功です。
注釈
OctoMapが表示されるのはシミュレータ利用時のみです。
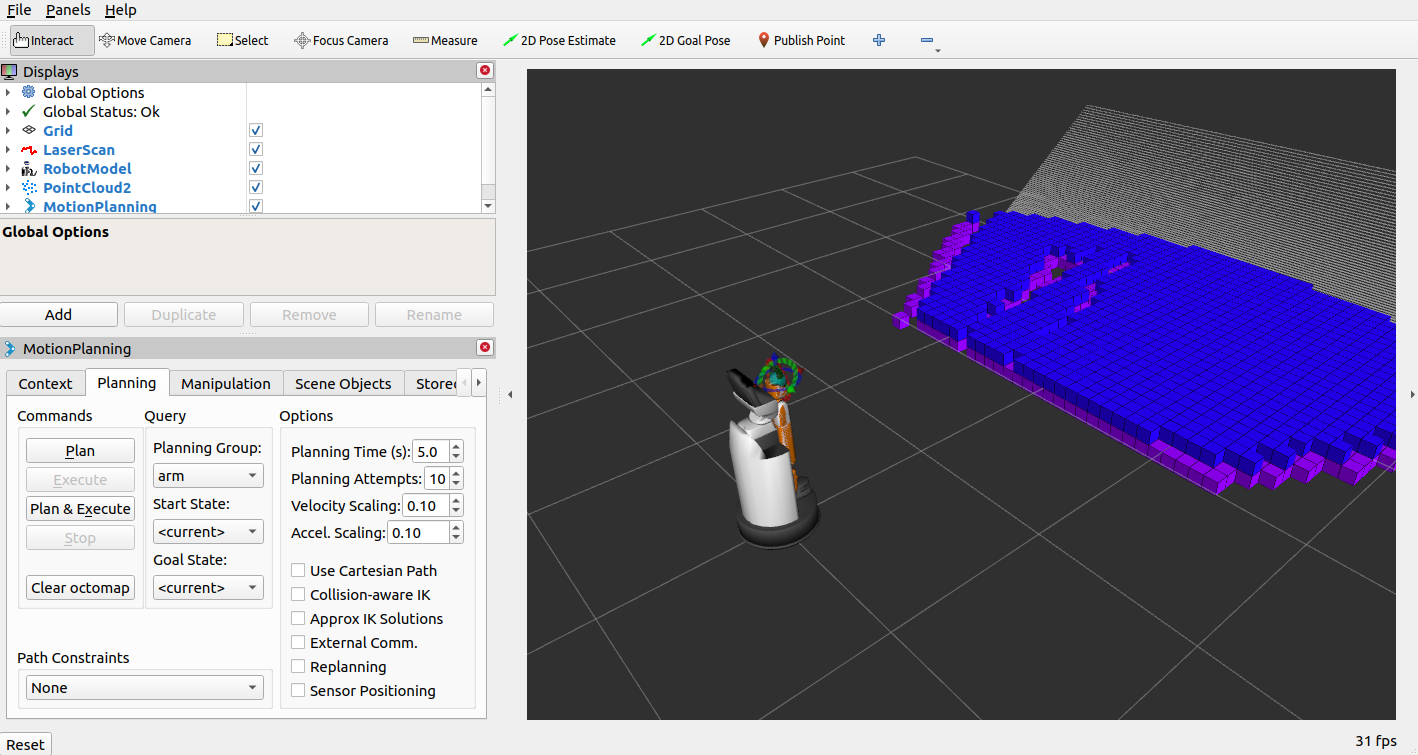
rvizから動かす¶
rvizのMotionPlanningのチェックボックスを外し、付けることで、以下の様にMotionPlanningのウィンドウが表示されます。 以降は、公式チュートリアル を参考に、MoveIt2をご利用ください。
Move Group C++ Interfaceから動かす¶
hsrb_moveit_configには、Move Group C++ Interfaceの、HSRでの使用例が含まれています。 以下のコマンドで、使用例一覧を確認できます。
$ ll ~/repositories/hsrb_moveit/hsrb_moveit_config/example/
実行するには、以下のコマンドを入力してください。example_nameは、適当な使用例の名前に変更してください。
$ cd ~/moveit_ws
$ source install/setup.bash
$ ros2 launch hsrb_moveit_config hsrb_example.launch.py example_name:=moveit_fk_demo
注釈
HSRC の場合は hsrb_example.launch.py の代わりに hsrc_example.launch.py を利用してください。